
Expanding the Radius of Daily Life
How to Make Flying Cars an Everyday Reality
Welcome to the 575 newly Not Boring people who have joined us since our last essay! Join 269,093smart, curious folks by subscribing here:
Hi friends 👋,
Happy Monday!
J. Storrs Hall first asked “Where is my flying car?” in 2005. Sixteen years later, in 2021, Stripe Press was able to republish his cult classic because the question remained open. Five years later still, in 2026, a year in which computers write most of the code themselves and medicines seem poised to cure everything that ails us, Hall is still waiting along with the rest of the world.
There are many reasons we don’t yet have flying cars, but there are even more to suggest that now may be the time to build them.
About a year and a half ago, I started to notice Tsung Xu tweeting about a VTOL (vertical takeoff and landing) plane he was building from scratch. Then he kept making progress.

I knew and respected Tsung from his writing on energy and materials - I linked to his work way back in September 2022 - and thought it was cool that he was playing around with drones, but I didn’t think much more of it, until he reached out to ask if I wanted to learn more about the company he was building, Vight.
On that call, we nerded out about the myriad why nows for flying cars, what a practical flying car might look like, and what it would take to make them affordable enough to impact humans’ daily life. I angel invested in Vight, and have gotten a front-row seat to the progress Tsung and team have been making towards delivering Hall a satisfactory answer.
Then, when I wrote that “I have a hunch that drones, EVs, and EVTOLs should expand local frontiers” in April’s Scarce Assets, I asked Tsung - the rare entrepreneur who I knew as a writer first - to write us an essay expanding on how he’s planning to expand the radius of daily life.
The goal for these essays is to understand the bets that people building at the frontier are making with their careers. They are one person’s view, by definition, because I think that the beliefs that makes talented people go all-in on something are the best raw material I can give you for shaping your own beliefs on the future. And the future that Tsung is betting on is one that I want: one where we finally get flying cars.
Let’s get to it.
Today’s Not Boring is brought to you by… Framer

Launch fast. Design beautifully. Build your company’s website on Framer.
Framer helps teams design, build, and launch their marketing sites lightning fast. With the ability to publish hundreds of CMS pages in a single click, operate at a global scale with seamless localization, and even host unified content across multiple domains, teams have never been able to ship faster. Companies like Miro, Bilt, and Perplexity trust Framer to achieve:
Speed without chaos: ship pages and updates faster without turning the site into a fragile set of one-off hacks.
Reduced dependency: shift routine brand and marketing work out of product engineering queues.
Production-grade foundation: Run real marketing systems (CMS, SEO, performance optimization) with governance and collaboration.
👉 Build your company’s site on Framer today
Expanding the Radius of Daily Life

It’s hard to fully imagine how drastically flying cars will change our lives, because we don’t have flying cars yet.
When you think of flying cars, you might think of cars with wings that let you fly right over the traffic from your current home to your current office, or of air taxis that shuttle you between Manhattan and JFK. You think about traveling faster between the places you already go.
That undersells the promise of flying cars. What flying cars do is expand the radius of daily life.
In his 1934 tome Technics and Civilization, Lewis Mumford credits the mathematician Bertrand Russell for discovering what would come to be known as Marchetti’s Constant:
Mr. Bertrand Russell has noted that each improvement in locomotion has increased the area over which people are compelled to move: so that a person who would have had to spend half an hour to walk to work a century ago must still spend half an hour to reach his destination, because the contrivance that would have enabled him to save time had he remained in his original situation now—by driving him to a more distant residential area—effectually cancels out the gain.
As Cesare Marchetti detailed in his 1994 paper Anthropological Invariants in Travel Behavior, “humans are ‘naked apes’ in many dimensions of their behavior involving territory and personal contacts.” It is an anthropological invariant rooted in territorial behavior that when humans access a faster mode of transportation, they use it to travel further instead of traveling less. We are born to spread.
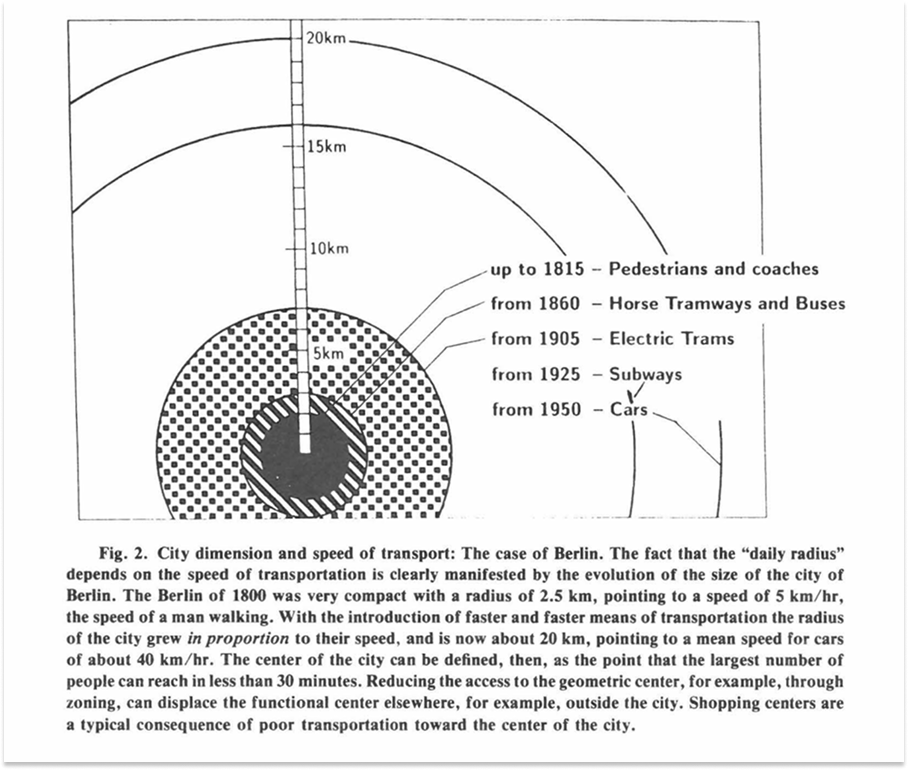
We like to commute about 30 minutes each way, or about an hour a day. Give us a faster vehicle, and we don’t pocket all the time we save. We spend it to reach more of the map.
The ability to fly point-to-point further in 30 minutes than you can drive today promises more optionality: more places where you can live, work, and visit, more often. This might mean living where you can have more land, or by the water, or in a community that fits your values, and still working where the opportunities are. At scale, it might even mean reshaping where economic opportunity exists. In the future, the choice will be yours, and it will happen sooner than you might think.
That is the future I’m working on at Vight. For a number of reasons that we’ll discuss, I believe that now is the time to build the flying car we were promised.
To get there, the experience we build needs Tesla supervised-FSD levels of intuitiveness, flying you the vast majority of the time. It needs to be safe. It needs to be mass manufactured, eventually, like a Model T.
Most importantly, it needs to be fast and offer freedom, to be able to fly to most places cars can drive to, and some places that cars can not.
That is the point of technology, to push out the efficient frontier and eliminate trade-offs. And if we want to explore the physical world nearly as easily, and much more magically, than we explore the digital one, we will need to eliminate the trade-off between speed and freedom.
Speed or freedom: we don’t have both (yet)
For all of our cumulative efforts, we have yet to devise a mode of transportation that is freer than walking. You start wherever you are, and stop wherever you want. You can duck into alleys or buildings, climb up or down stairs, or simply stop and wonder, wherever you’d like.
Walking, though, is slow, so humans have invented myriad modes of transportation that can get us from point A to point B in less time, at the expense of point-to-point freedom.
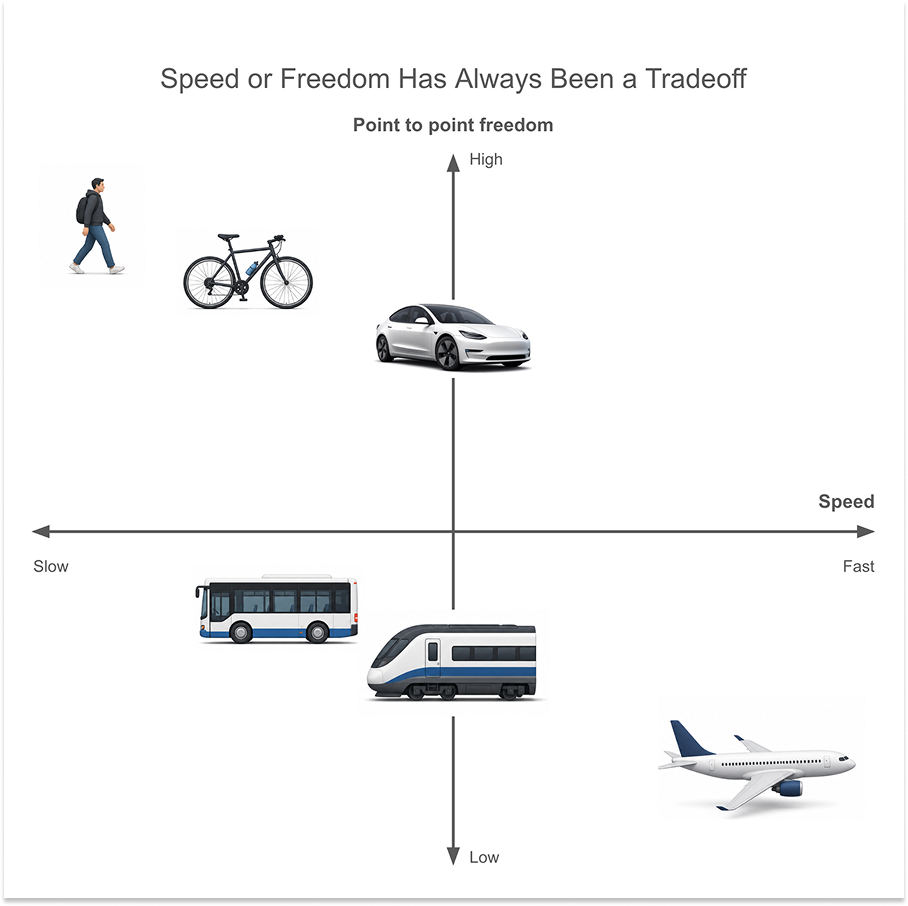
Bicycles are faster, but they can’t reach quite everywhere you can on foot. A car is faster than either, but they can only take you as far as the edge (or endpoint) of the road network.
There’s another class of vehicles, hub-to-hub vehicles, that offer less point-to-point freedom, but require less work from the traveler and, in the case of commercial airplanes, go much faster in transit. Each requires you to get somewhere, at an appointed time. Riding a bus requires first going to a bus stop, a train leaves from the train station, and an airplane takes off from an airport after some unknown but now-almost-guaranteed delay. Using any of these means real friction getting to and from the hub, and once at your destination airport, you still need another mode of transportation to cover the “last mile” to your destination.
Still, these are the marvels we know. The car has been the best form of point-to-point freedom for the last 120 years in America and other wealthier countries. Aircraft win on raw speed over any surface, land or water. But cars and aircraft each solve only one axis of the problem.
You can see the split in the history of transportation: one lineage optimized for point-to-point freedom, the other for speed between hubs.

The future we want requires both: aircraft speed with car-like point-to-point freedom.
To understand why flying cars are the answer to this particular trade-off, we will traverse the history and near-future of transportation technologies. We are in the midst of a revolution in these technologies across many fronts - from autonomous vehicles to supersonic planes to air taxis - each of which will change the way that we move ourselves and our things. We’ll also find that while each is awesome at certain things, they don’t eliminate the specific trade-off we’re after in the way that flying cars uniquely do.
Flying cars, of course, come with their own challenges, which we’ll discuss, but we believe that expanding peoples’ worlds is worth the fight.
Because where we’re going, we don’t need roads.
The limitations of cars and roads
Thanks to the incredible progress made by Waymo and Tesla, people are starting to get rightly excited about self-driving cars. “Always ten years away,” they’re here now. Just last week, Tesla opened up its unsupervised Robotaxis to serve the entire Austin Metro area.
Self-driving cars will serve a growing portion of our driving miles in the decades to come, and their growth will save many lives and give us time to do other things. I’m personally excited for when they start redesigning self-driving cars as moving lounges instead of traditional cars. But until and unless they replace almost all of the human-driven cars on the road and learn to communicate losslessly with each other, they don’t solve the speed-freedom trade-off, because they’re still cars, and they still need roads.
Cars have been incredibly useful in helping us get to places further away and faster, while protecting us from the elements, but they’re fundamentally a 120-year-old technology that depends on road infrastructure. Roads present chokepoints, are jammed with traffic, and slow us down.
Despite the fact that our cars are much more capable than the Ford Model T, cars in 2026 don’t take us from point A to B much faster in urban or suburban areas than Tin Lizzie did. During rush hour, cars crawl at 17-24 mph in LA and 11-15 mph in New York City. A smaller city like Austin does not fare much better at 14-33 mph.
Adding more lanes to the highway famously doesn’t help much. Traffic is the canonical example of induced demand: add more lanes, and you encourage more people to drive, and the traffic is just as bad. Worse, even, because it’s not the highway itself that’s a chokepoint, but the on and off ramps. Off the highway, traffic lights gum up the works. Even if Autobahn-like unlimited highway speeds were approved in your city, you’re still idling at the next traffic light once you get off during rush hour, and the highway itself will still block up as a result. All that assumes the highway will be built, which is probably too much to ask if you’re living in California, for example.
There’s also the physics problem. Drag increases with the square of velocity. By increasing your speed from 70 mph to 200 mph, you are effectively increasing your drag by ~8x. Power scales with drag x velocity, so about 23x more power is needed at 200 mph vs 70 mph. To go really fast, the range of your car, whether gas or electric, is going to take a massive hit. Driving that fast will massively increase the wear and tear on your tires and other components. Making 200 mph normal, efficient, safe road travel is a completely different problem than making cars drive that fast.
The capabilities of the infrastructure gate the capabilities of the vehicle. You could be driving a Corolla or a Bugatti and it would not matter in cities during peak hour.
That said, roads and later highways did expand the capabilities of cars. The infrastructure answered the question “Where can cars go?”. Carmakers could then invest a century in making them easier to drive and driving down costs to make them usable by more people. Automating the ignition, automatic transmission, and manual then adaptive cruise control were all examples of this. With self-driving today, the easiest to use car is the one that does not need to be driven.
A car’s fundamental job is to get you from A to B. By that standard, a Model Y with supervised FSD or Waymo does that job better than a car that requires you to still drive it. In fact, many people I know primarily drive a Tesla with HW 4 because of FSD. It’s a functional utility, but such a step change in ease of use that they can’t live without it. The best version of a car is no longer the most expensive purist vehicle but the one that gets the most people from A to B with the least effort.
Still, AVs make cars easier to use but don’t solve the challenges with the limitations of roads.
AVs are really convenient, but in the context of our speed-freedom matrix, they’re not any faster. In fact, hailing Waymo is slower than just getting in your car and driving. This is especially true in rush hour. Fundamentally, they don’t expand the radius of daily life.

No matter how much intelligence the vehicle has, the infrastructure layer is the limiting factor in point-to-point speed.
So… go above the infrastructure, right?
The limitations of today’s personal aircraft
Unfortunately, personal aircraft like the Cessna 172 have not changed much in the last 50 years, either.
The biggest upgrade on base models was shifting from “six pack” steam gauges to “glass cockpits,” which effectively offer digitized flight displays for pilots and passengers. The 172 is still one of the best selling GA aircraft by units. Newer 172s give better situational awareness for pilots, but they still require a human to be in-the-loop flying the aircraft with a control stick, throttle and rudder pedals. At $400,000, a new 172 is not even close to affordable, let alone easy to fly.

Personal aircraft are also limited by runway dependence and operating friction. There will only ever be a limited number of people who will purchase a vehicle that is usually stored far away from where their home is.
To fly, the pilot needs to drive to the GA airport, go through a manual pre-flight checklist that could take 15-30 minutes, and crank the engine, perhaps multiple times. Many engines still use a carburetor to mix air and fuel for combustion, components phased out by the automotive industry since the late 1980s.
Personal aircraft never could offer the same point-to-point freedom as cars did. The open skies were gated by sparse airports. Aircraft had speed, but airports and runways answered “Where can it go?” with “To and from an airport.” So the industry optimized for capability without reducing pilot workload; it could not optimize for everyday usability. The result was better aircraft, but not aircraft that more people could use.
Imagine how many people would drive cars if they were not parked at home, but in parking garages miles away. This is the challenge of any hub-to-hub vehicle, minus the scheduling issues in this case, because you can take off and land when you want, and it is the fundamental limitation of personal aircraft.
GA aircraft sales: booms, busts and runway dependence
That limitation is one of the reasons sales of general aviation (GA) aircraft sales have crashed since the 1970s. There are many, but if people were clamoring to fly 172s, I suspect the market would have figured out the rest.
Americans did use to buy GA aircraft, back when they were more affordable. Higher volumes enabled lower prices, and lower prices enabled lower volumes. In the late 1970s, US shipments of GA aircraft were close to 20,000 units per year:
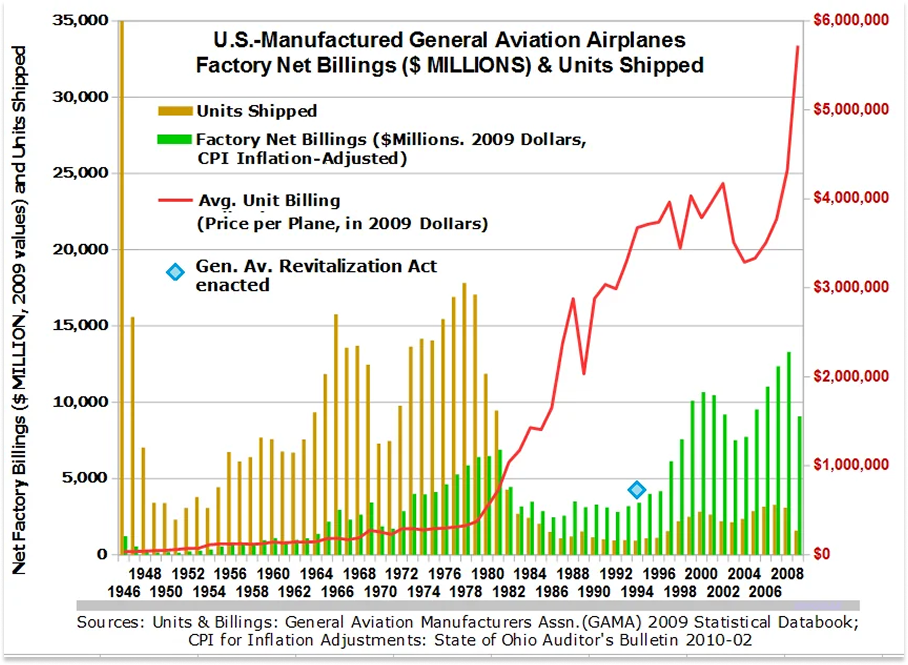
Without looking hard, you can see that shipments fell off a cliff beginning in the late 1970s, falling nearly 90% to 2,000 units in 1985. To understand why “this time might be different” for flying cars, we should understand what’s in the black box on GA aircraft.
First, as always, money. The second 1970s oil shock and the early 1980s recession, combined with high interest rates, made new purchases, especially financed ones, unappealing. At the same time, in an echo of the nuclear industry around the same time, aircraft OEMs had expected that the boom times would continue, and so they overproduced. By the 1980s, technology improvements compared to the decade prior were minimal, there was a glut of used supply practically as capable as new vehicles, and tax incentives pushed people to buy used.
Normally, people blame the lawyers. J. Storrs Hall, too, assigns them a good deal of the blame:
The 1970s brought an increase in product liability, a major social change that was nominally aimed at safety. Scare stories worked on juries just as well as on the reading public, and juries would vote enormous awards for accidents that didn’t have any reasonable connection to malfeasance on the part of a manufacturer . . . This led directly to the collapse of the general aviation industry. Over the course of the 1970s and 80s, it was strangled by the explosion of product-liability lawsuits.
Again, as with nuclear and regulators, that read confuses the timing. Product liability lawsuits locked in the collapse in piston engine aircraft sales that was already underway. Brian Potter wrote a great analysis on this, Planes, Claims, and Automobiles, which includes this quote from John Baker, the former president of the Aircraft Owners and Pilots Association (AOPA):
Product liability judgments are not the cause of the new aircraft shortage in which we find ourselves. It is merely a symptom. The cause of the problem was clearly some unbelievable bad business decisions by the manufacturers 15 to 20 years ago, which is compounded by some lousy products. If the industry was annually producing the 20–25,000 quality products at an affordable price that the marketplace would absorb, then the per-unit product liability insurance costs would not be significantly greater than they were in the mid-70s.
John Baker, 1988 letter, emphasis mine.
So fix demand. Simple, right?
It’s worth a quick look at the very left of the chart above. The peak shipments ever were actually not in the 1970s, but in 1946, at 35,000 units. As pilots retired, there was a subsidy for flight training and most of the flight hours were from instructional flights. When the new pilots were trained and subsidies went away, the demand did, too.
Market gluts are not sustainable drivers of demand. For that, you need new technologies that actually improve the product in material ways. For that, though, you need demand. It’s a vicious circle when it works against you.
The lack of technological improvements was a major reason the GA aircraft industry never recovered after the 1970s. New aircraft engine programs cost around $100 million, and no one wanted to take the risk of investing in better technology in such a small market. Even when companies promised new compelling concepts in GA, the aircraft still ran into the same problems of runway dependence and difficulty to fly.
What about GA helicopters? They can take off and land vertically (VTOL), but lose out on ease of flying and safety perceptions. There is a high level of pilot skill required to learn to fly a helicopter safely, as well as the ongoing maintenance of those skills. In order to remove much of that pilot workload, you’d need to purchase stability augmentation and autopilot systems. But your autopilot system will still cost around $50k+ on top of an already expensive $500k helicopter like an R44. Because they’re complex machines and prone to mechanical failure, helicopters also place a high maintenance and operational burden with manual pre-flight and post-flight checks to ensure safety.
(Packy note: Kobe Bryant died in a helicopter crash on my birthday and Puja and I once watched a helicopter crash into New York’s East River, so I don’t plan to ever fly in a helicopter.)
Helicopters are getting upgraded, though. Skyryse takes existing aircraft and removes all mechanical controls, installs a digital fly-by-wire system, and replaces the cyclic, collective, and tail rotor pedals with a single control inceptor (like a specialized joystick) and a pair of intuitive touchscreens. It makes helicopters much easier to fly, and adds autonomy to the mix. At the moment, however, Skyryse’s system costs ~$400k more than a SAAS upgrade on an R44, and is being used on more expensive craft, like the Blackhawk Helicopter.
Helicopters are cool, but they, too, don’t technologically solve the trade-off for regular people.
Today, though, we finally have new technology: eVTOLs.
What about Air Taxis?
Going from a metro airport to downtown, air taxis can be faster than taking a car, but they are still hub-based. They have about as much point-to-point freedom as taking a bus, in that you still need another mode of transportation to get to and from the vertiports they plan on using. Once you’re there, though, air taxis go further, faster than buses can.
Air taxis use VTOL technology, which stands for vertical takeoff and landing. As the mouthful of a name suggests, this technology makes precise takeoff and landing possible. Air taxis demonstrated that electric VTOLs (eVTOLs) can fly, but they are limited by the constraints of the takeoff and landing hubs they must operate from.
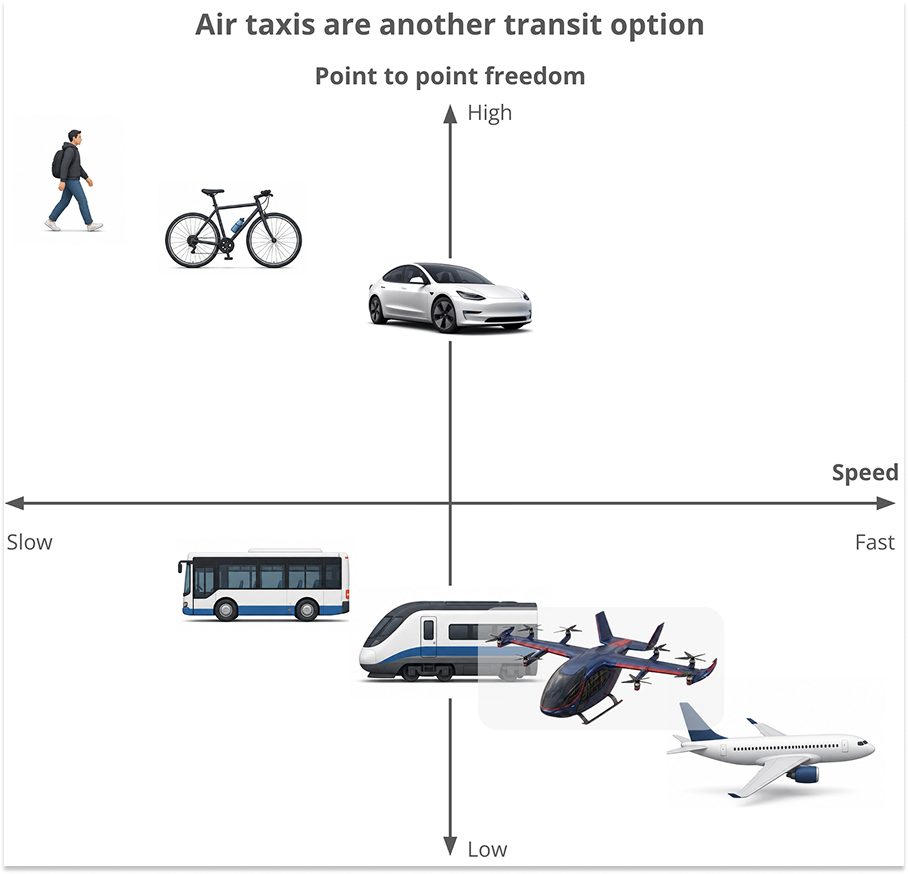
These hubs, the takeoff and landing infrastructure for air taxis, are called vertiports. With commercial services, they are in many ways like a train station. People need a place to wait for their ride. Trains are awesome, and they expand the world too, so we’re excited for the possibilities that air taxis open up. Adding new options on the hub-to-hub frontier is good, because places that are currently inaccessible for urban workers will become accessible.
It’s just that we don’t think they’re the end game, and they face their own challenges.
Charging and maintenance logistics are tricky, for example. Where should the vehicles be kept when charging? There’s a lot of complexity on the ground to be managed. Plus, it’s challenging to get permits for vertiports, especially when sited in dense urban areas, and it becomes more challenging when you need to establish a network of them for any of them to be useful.
Air taxi companies have also been constrained by the regulatory pathways available to them. The regulatory burden is a large reason why US-based air taxi companies have been in development for 8 to over 15 years but are not yet in commercial operations, although that is showing signs of thawing slowly.
The air taxi model likely works better in dense cities, and particularly in places like China, where it’s much easier to stand up urban vertiports. Even with pilotless operations, though, Chinese air taxi company EHang’s cost structure is high. Focused on tourism as their first wedge, 298 RMB ($45) per person would “basically cover flight costs”for two people for up to ~20 minute flights, as per a recent earnings call.

These costs should come down with scale. Part of the challenge is that EHang’s fleet is still fewer than 10 aircraft. But ground ops, low utilization, and vertiport overhead add layers of economic difficulty. The extra friction associated with putting landing pads on buildings in crowded cities - even in China, let alone America, makes it much harder for air taxis to come down the learning curve.
That said, American companies like Joby and Archer are making real progress.
Joby has logged over a thousand test flights across three countries, completed Stage 4 of FAA Type Certification (the furthest any eVTOL has gotten in the US) and is now in Stage 5, the final phase, with a type certificate targeted for late 2026. They’ve demonstrated JFK-to-Manhattan routes and been selected for the FAA’s eVTOL Integration Pilot Program across 13 states.
Archer closed Phase 3 of its own certification process in April, is flight testing Midnight nearly every day at Hawthorne Airport in LA, and is building out a Stellantis-backed manufacturing facility in Georgia targeting 650 units per year by 2030.
Both companies have proven that eVTOL aircraft can fly reliably in real-world conditions, navigate complex certification processes, and attract serious capital and partnerships: Delta and Toyota for Joby, United and Stellantis for Archer. That work has de-risked the core technology for the entire category, including us. And in the short-term, they will offer transit options that we don’t and unlock routes that we won’t. We are targeting different initial markets, and we want both to succeed.
In the future, cities will be dotted with vertiports, but I believe that can only happen meaningfully once the unit economics close and operational friction can be removed. Then, demand will merit the investment necessary to make vertiports work.
Air taxis will replace and improve on some hub-to-hub transport modes. They will not deliver full point-to-point freedom, though, which is what we are attempting to achieve. We want to give people their own flying cars.
In that pursuit, there are several key lessons we’ve learned from air taxi companies:
Regulations are destiny and constrain the GTM pathway,
Slow certification pathways drag iteration loops, and
eVTOL flight dynamics are hard but have been proven solvable.
Many people conflate air taxis and eVTOLs, whereas air taxis are just one application of electric VTOL technology.
That’s why I use “flying cars” in this essay, even though the aerospace industry says eVTOL. eVTOL describes the technology. Flying car describes the category we’re focused on: aircraft speed with car-like point-to-point freedom. Calling this an eVTOL is a little like calling an automobile a horseless carriage. Technically understandable, but not how normal people think about the thing once it becomes truly useful.
Extreme speeds are coming, but not for daily travel
It’s worth noting some other ways we’ll move faster and further in the future. There are a few archetypes that are being developed today that focus on extreme speed, hub-to-hub.
In ten to twenty years we could be taking supersonic or hypersonic aircraft, leveraging the very low drag in the upper atmosphere to fly at Mach 2 or higher across the Pacific, across the Atlantic, or anywhere on the planet.
Suborbital rockets like Starship would make these trips less comfortable, but would take you from any launch site to any landing site at up to Mach 25. Again, these are hub-to-hub options, and the hub, for the foreseeable future, is a launch pad somewhere far enough from people to launch rockets from. They optimize for speed but at the cost of point-to-point freedom of the vehicle.
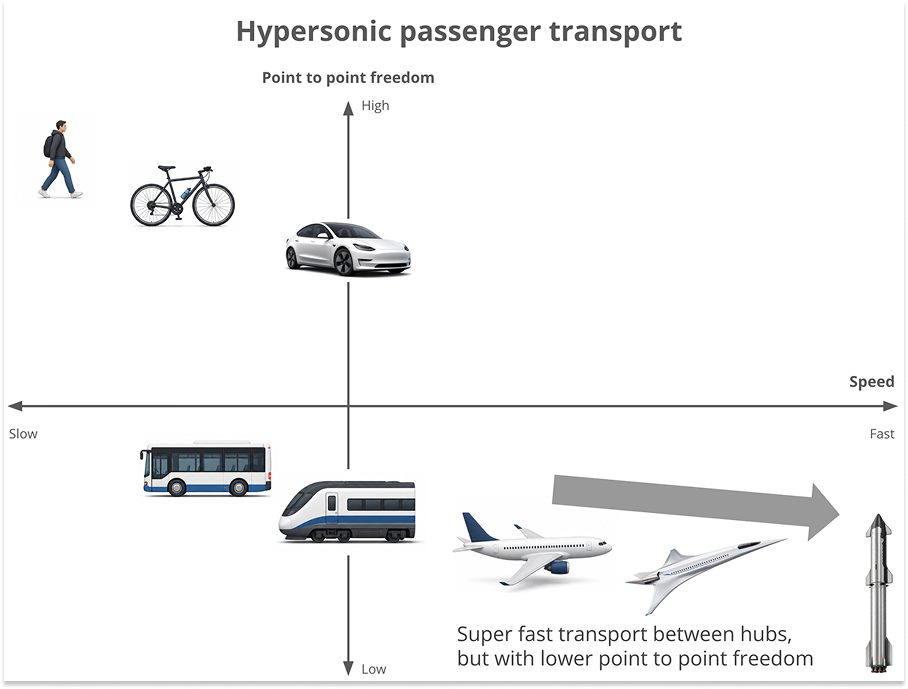
As a result, you need very powerful and large vehicles that don’t make sense for point-to-point use. These are better suited for moving groups of passengers very quickly over very large distances. It’s a logical but radical extension of the hub model.
The future of long-distance travel will be supersonic and maybe suborbital, and we can’t wait, but these journeys will fall outside of Marchetti’s constant.
For fast, point-to-point travel that expands where we can go in 30 minutes or an hour, there’s one option left.
Flying cars offer speed and point-to-point freedom
It should be pretty clear by now that no widely used or anticipated vehicle category offers both speed and point-to-point freedom. The tradeoff we’ve faced for as long as we’ve built tools to augment how far and fast we can travel still exists.
Flying cars will break the trade-off.
Let’s define a flying car. Most people think of a flying car as a car that flies and can travel on roads. I think it’s simpler than that.
A flying car is really a vehicle that flies point-to-point with car-like convenience.
People will disagree and say, “That’s not a flying car. It can’t use roads.” As we talked about earlier, roads are an infrastructure constraint. Flying cars will not need to be roadable to be useful.
They have VTOL capabilities, allowing for takeoff and landing anywhere there’s a small pad. That means vertiports, eventually, but it also means right in your backyard.
At Vight, our first vehicle platform will cruise at about 110 mph, and future platforms will target close to 300 mph. Plus (and this is also very important), they will dramatically reduce the workload required to pilot an aircraft. This trifecta has never been possible before.
Flying cars fill the empty quadrant in our 2x2:
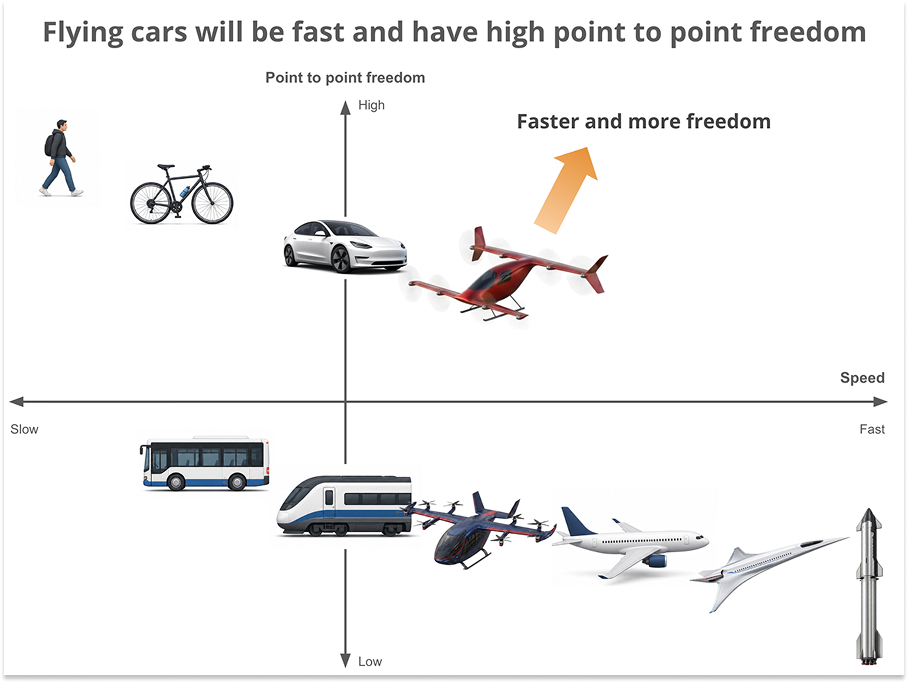
VTOL changes the answer to “Where can it go?”. Software-defined flight changes the answer to “How hard is it to operate?”. Put them together, and personal aviation can finally make flying dramatically easier and more accessible. Cars spent a hundred years turning a vehicle that already had endpoint freedom into something easier, cheaper, safer, and eventually intelligent. Flying cars start with the benefit of that entire software and autonomy stack being mature.
That is why we can now target a step change in the ease of flying a personal aircraft. For most of aviation history, that was not possible. You could add better instruments, better autopilots, or better training, but the aircraft was still fundamentally a pilot-workload machine tied to runways and airports. A practical flying car will use intelligence to absorb more of the workload, while also removing the runway as the core endpoint constraint.
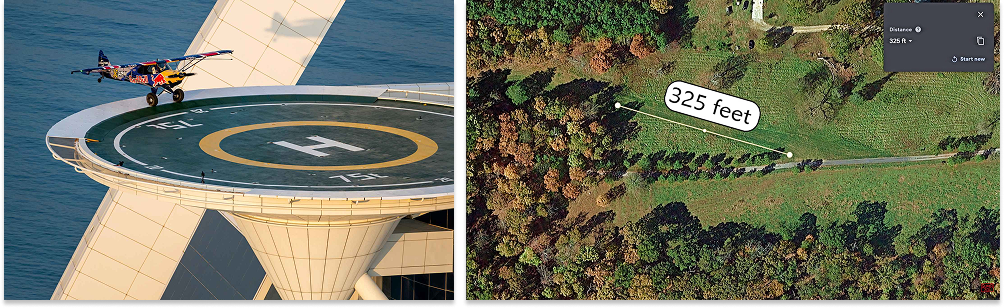
So why not just make the runway shorter? Couldn’t STOLs (Short Take Off and Landing) be the answer for faster point-to-point travel?
After all, short takeoffs with an STOL bush plane means you can take off with as little as 50 feet of runway.
The problem is they are still dependent on a runway. Yes, runways can be shorter, but STOLs still need clear approaches, clearance over obstacles like trees, dependence on wind directions and maintenance of the surfaces. If you put all of these together, that ends up requiring about ~5x more land relative to a personal-use eVTOL. In addition, pilots need to be more skilled and have less margin for error on takeoff and landing.
Flying cars, done right, can offer a different experience.
The pilot experience for a flying car
You tap your phone, set your destination, and start the automated preflight checklist. The battery starts pre-conditioning and the onboard system runs safety and other checks for you, all in the background. You walk outside to your Vight aircraft on your pad. You take a quick walk around the vehicle, hop in, press a button on the single control stick, and take off.
Once off the ground, you will be able to use the advanced autonomous assist features. Tap to confirm transitioning from hover to forward flight, and when approaching your destination, tap again to confirm the landing zone. At any time during the flight, you can direct the aircraft using the control stick. It should be a nearly pedestrian, boring experience. When flying with the autonomous capabilities we will have for our first-gen aircraft, it will be as simple as that. The experience is far closer to that of just getting in your Tesla and driving with FSD than it is to that of piloting a personal aircraft.
We can only leverage this breakthrough if safety and redundancy are built into the design from day one. Our aircraft will use redundant motors, battery packs, flight computers, sensors, and other safety-critical components, with the system designed so that no single failure should lead to loss of the aircraft. It will intelligently handle situations like a motor or single battery pack failure as a pilot-assist feature, while keeping the pilot in control. We’re sizing the propulsion system to handle weather like wind gusts at up to 10,000 ft above sea level. And in the extremely unlikely case of a complete loss of power, the vehicle will deploy a whole-aircraft parachute.
Just as critically, we’re designing to dramatically reduce pilot workload, one of the major contributors to the pilot-related causes that dominate GA aircraft accidents. In AOPA’s 2023 non-commercial accident data, pilot-related causes accounted for two thirds of aircraft fatal accidents and almost 80% of helicopter fatal accidents. Simplifying controls, having guardrails during flight, and intelligent pilot-assist features help avoid the primary cause of accidents from happening.
The design breakthrough with flying cars is that it can operate like both an eVTOL and a fixed wing aircraft, depending on which phase of the flight you’re in.
The takeoff and landing phases are vertical or near vertical, which gives the precise endpoint capabilities we’ve been talking about. During the transition phase, the wings tilt forward, shifting the lift production from the rotors to the wings. Once the aircraft transitions, it climbs on its wings, at a forward airspeed of over 100 mph and much higher efficiency than in hover. It then stays wingborne for the vast majority of the flight, like an aircraft, before transitioning back to hover for landing.
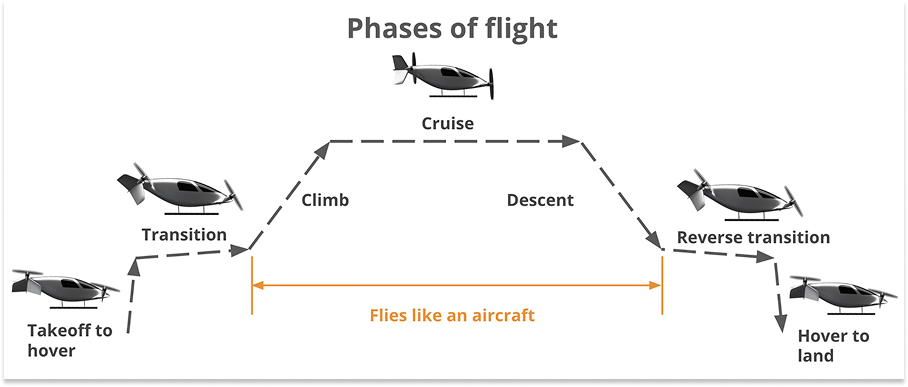
For eVTOLs, cruise is several times more efficient than hover, so maximizing time flying like an aircraft is important. Not to scale.
This is possible because a multicopter’s core flight control system is already software-defined. The pilot doesn’t have to directly handle aircraft stability, whether the vehicle is a 250 gram drone or a 1200 kg eVTOL. The onboard flight controller does that continuously, adjusting RPM for each rotor hundreds of times per second to maintain stable hover. Without that stabilization layer, a multirotor would be effectively unflyable by a human using a stick alone.
Our platform’s autonomy and VTOL capabilities enable dramatically lower pilot workload, while still maintaining control that mimics how a great pilot would fly a helicopter. A helicopter is very hard to fly, and especially to hover, without simplified flight controls, and the flight controls in helicopters today are not simple.

This lack of easy-to-use controls was one of the reasons GA aircraft and helicopters weren’t able to reach the mass market. Flying is very skill-intensive.
With supervised autonomy, however, we can have guard rails through the whole flight envelope, as well as auto-takeoff, auto-landing, and intelligent sensing. On our first generation platform, these are all sophisticated pilot-assist functionality so the pilot is always in control. That’s only possible when a pilot-defined system becomes software defined.
Beyond that, the Vight flying experience will simplify things like radio and air traffic control (ATC), or getting updated altimeter readings (i.e. for barometric altitude) while coming into landing. Today, even small cockpit tasks are manual for piloting a small aircraft. A pilot may still get the local altimeter setting by listening to an ATIS/AWOS broadcast, copying down the pressure value, and setting it in the barometric altimeter before departure or arrival. It’s not hard, but it is an example of many GA-specific microtasks that have to happen correctly. This is why pilots lean on checklists, but to make flight as simple and normal as driving, they should not have to.
For Vight, our customers will still need a private pilot’s license (PPL) that is required to fly any GA aircraft. That said, we’ll standardize and accelerate this experience, thanks to MOSAIC, which we’ll discuss more shortly. Customers will do either a week-long intensive course or finish over a few weekends. They will learn on site about the nuances of our simplified approach to aviating, navigating and communicating (A-N-C). Because of the pilot workload required to A-N-C, attaining a PPL has traditionally taken 60 to 80 hours. With simplified controls, we will target the 40 hours minimum of flight time required to attain a PPL. This is similar to the amount of hours required to become a competent driver, with states like CA, NY and FL all requiring 50 hours of driving experience for teenagers before granting a license.
We’ll give our pilots the confidence to know what to do in a low-probability failure event, like a motor failure or battery pack failure. They’ll know how to land safely and how to deploy the whole vehicle parachute in a failsafe scenario.
That experience sounds simple, as it needs to be. But the technology to deliver this experience wasn’t feasible until now.
Why flying cars now?
To have car-like convenience, we need to build VTOL aircraft that are easy to fly, with supervised autonomous capabilities from the start. They will also need to be fast, have useful range and be low cost to purchase, operate and maintain.
This requires the vehicle have several key underlying technologies and principles:
Software-defined systems and autonomous capabilities
Electric powertrains
Designed for higher volumes and standardized manufacturing
A regulatory path
Let’s walk through each of these.
Software-defined flight closes the sim-to-real loop
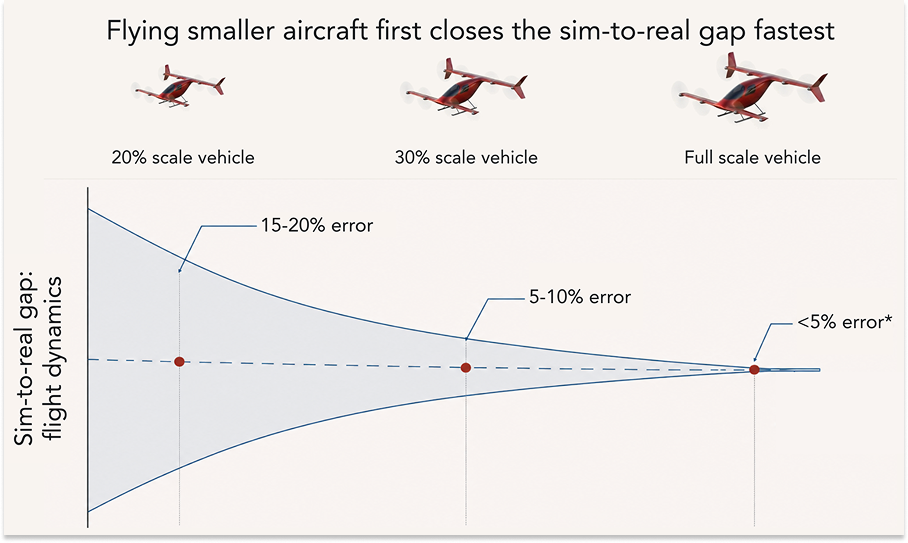
The most important technology for a flying robot is not actually the vehicle itself. It’s the development process for closing the gap from simulation to reality for how the vehicle flies and performs.
That loop has historically been slow for novel aircraft. High-fidelity models were expensive, specialized software was locked behind costly licenses, and compute was slow and expensive. Closing the gap between simulation and flight test took time.
The best hardware companies turned this loop into an advantage. In their first version of their Roadster, Tesla used a Matlab simulation to model the whole vehicle. In the early days of NVIDIA, when running out of cash, they bet on emulation software to test the RIVA 128 GPU design virtually. This allowed the GPU to be designed in only six months instead of 18 months. SpaceX made reusable rockets possible through tight integration of simulation, flight software, sensors, actuators, and control loops.
Flying cars need the same type of iterative cycle. The faster we close the sim-to-real gap, the faster the aircraft becomes safer, easier to fly, and more capable.
Agentic engineering accelerates this further. Agents in the loop in experiments maintain requirements and do other grunt work. Engineers still make the design decisions and integrate learnings from results to close the loop. We’ve been agentic-native from our inception at Vight. All engineering, compliance and ops are in repos that give the latest frontier models access to do much of the grunt work.
Autonomy reduces and eventually removes pilot workload
Aerial autonomy is not easy, but it has a different shape than road autonomy. A car in a city has to reason about pedestrians, cyclists, lane markings, traffic lights, construction, and other vehicles. Once an aircraft is in the air, the environment is more structured and less cluttered.
The enabling stack has also gotten much better. Cameras, inertial sensors, GPS, LiDAR, onboard compute, and vision models have all improved dramatically while costs have fallen. Tesla’s FSD system is one example of how far camera-based perception has come, but aviation will likely use a more redundant sensor stack. Zipline has made similar strides in their platform’s autonomous capabilities. The components needed for supervised autonomy are mature and standardized and the autonomy problems are hard but solvable.
We will also be able to use synthetic training data before we have large-scale fleet data. Today, Tesla trains a world model on fleet video, generates future camera and sensor data from a given scene and action, and then creates adversarial corner cases that are hard to collect naturally. We aim to apply this to Vight. Rare events, sensor failures, and emergency procedures can be simulated repeatedly before they happen in the real world.

The electric stack makes VTOL practical
We’ve seen remarkable improvements in many standardized components, especially in the last few decades. Performance continues to improve as technologies keep coming down their cost curves.
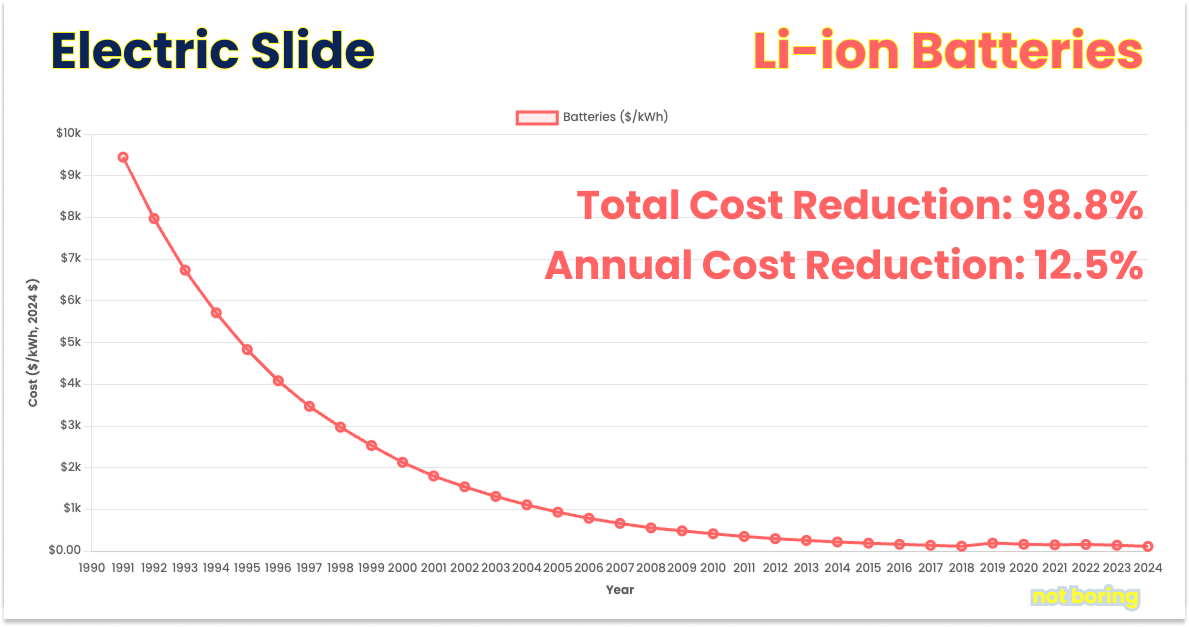
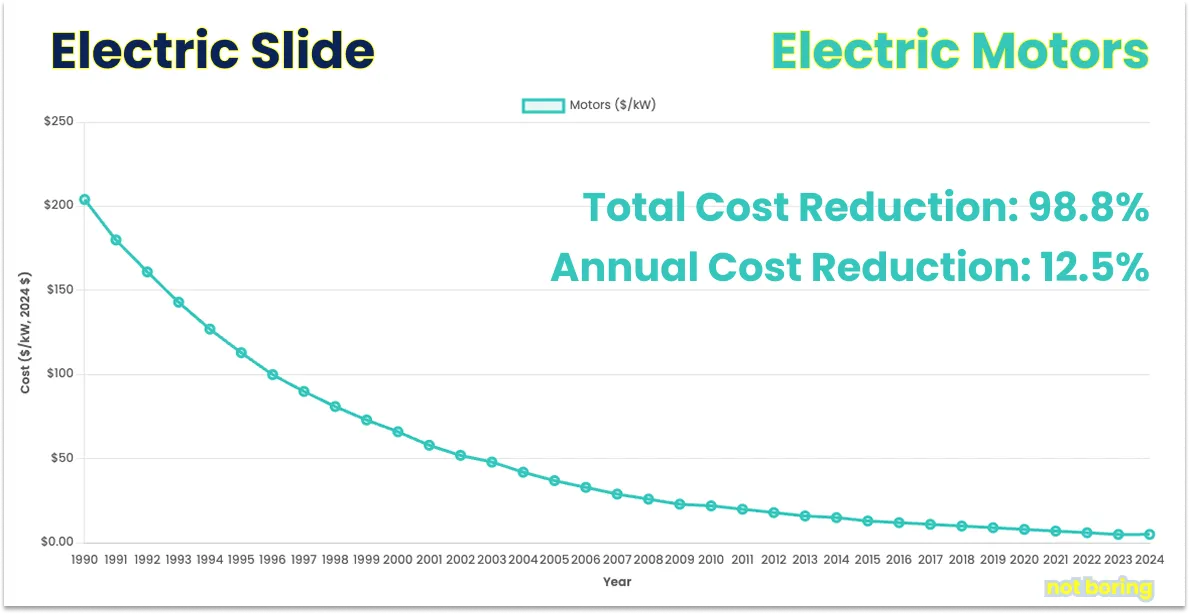
Batteries
As I’ve written about previously, lithium ion cell and pack costs per kilowatt-hour have come down dramatically since the first commercial cells that Sony used in 1991. They’ve become almost 99% cheaper at a compounding 12.5% annual rate, as deployed volumes have risen about a million fold.
Specific energy and power (both per unit mass) have both increased substantially in that time. Energy density is the biggest lever on range. They are up 3x-5x since 1991 depending on the cell. Improved packaging has increased pack level energy. Power density is actually just as important for VTOL capabilities, as it’s the higher power discharge rates in hover and takeoff that are critical for our use cases. There, 2.5 kW/kg is commercially available at volume and at a low premium over lower power cells.
Batteries are the best baseline energy source for flying cars. They simplify their development and operations, requiring only a standard port, like the SAE J3400 in the US, for up to ~20 kW home and destination charging. We will extend the range on future platforms, using a series hybrid architecture with a piston or turbine generator. In a hybrid architecture, engines can be sized for efficiency in forward flight, and provide additional power on takeoff and landing.
Even in a hybrid powertrain, batteries are still required to provide fast power transients. Hovering in wind, maintaining control margins, and responding to motor commands require near-instantaneous power changes. Engines and generators would take seconds at best to respond, and would be too slow to handle those rapid transients.
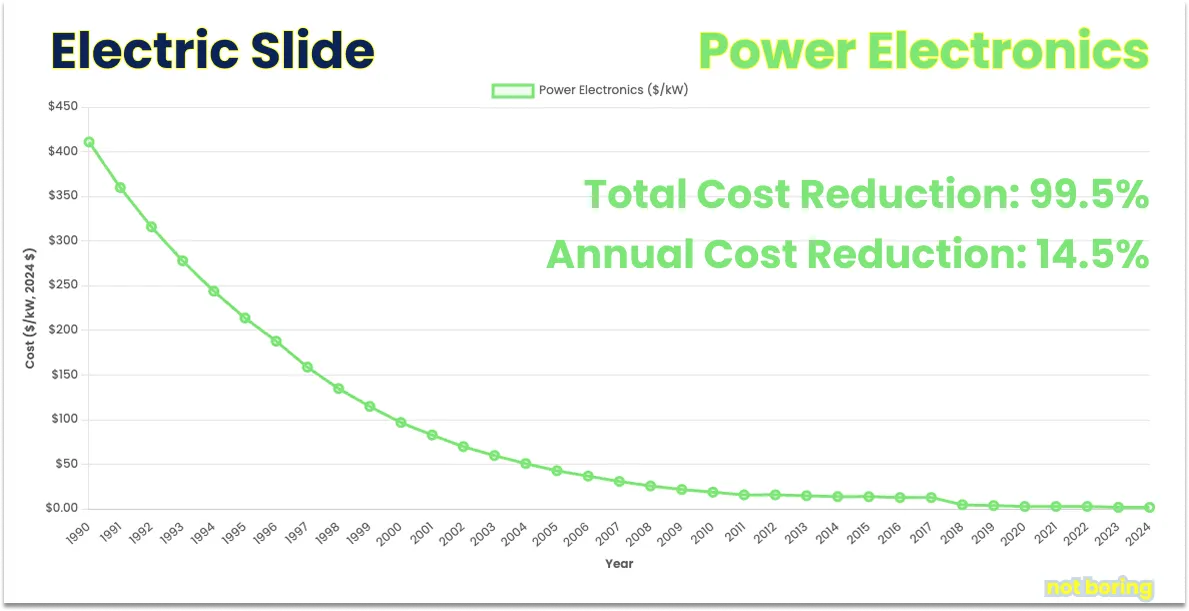
Electric motors and power electronics
Electric motors have also gotten dramatically better and cheaper.
Specific power and torque have been improving consistently for permanent magnet synchronous motors (PMSM) for decades now. They are highly efficient at a wide range of rpm, and can be direct drive for less moving parts and complexity. High end commercial PMSM motors like Joby’s have more power per kg than all but the most exotic turboshaft engines.
DC electric motors like PMSM have surged in specific power, from hundreds of W/kg to now high thousands of W/kg, with most of the gains coming in the past decade or so.
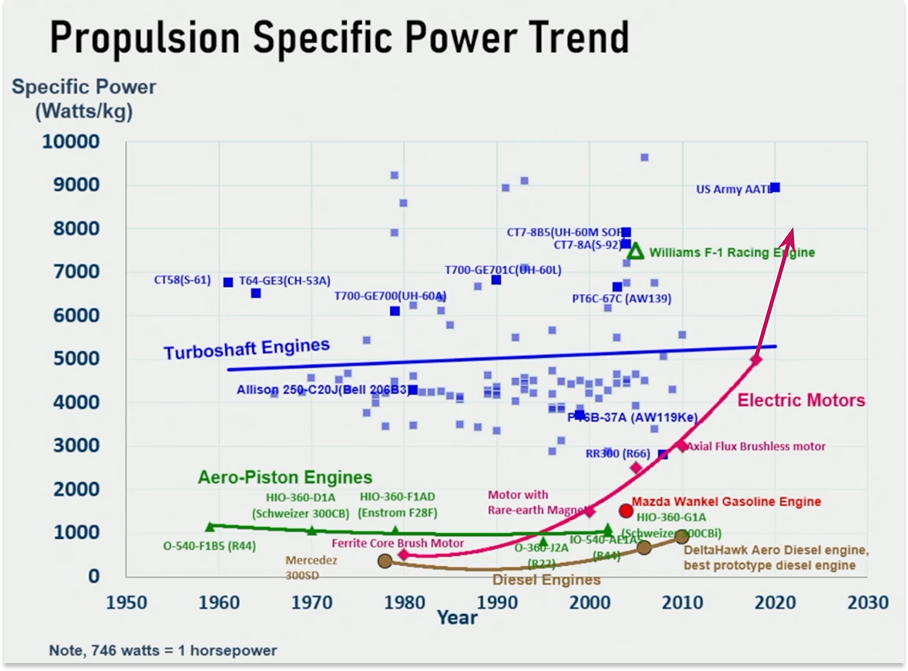
High torque at low rpm is also a driving constraint for direct drive motor performance. Fast adjustments in motor rpm for maintaining hover stability require high torque motors to spin up and down rapidly. That’s no longer a problem, as the best commercial PMSM electric motors today are extremely high torque, with specific torque around 50 Nm / kg.
There’s still a ton of headroom here to design more optimized motors, partly because there have been so few motors built specifically for VTOL aircraft. Few iterations have yet happened on designs to continue improving them. There is even a motor designer I know who has used workstations in his garage (and more recently on AWS) to design motors in simulation that match the performance of best-in-class commercial motors, at a fraction of the cost. Expect motors to continue getting better while continuing to get cheaper.
Power electronics have improved alongside the motors. Inverters convert battery DC into precisely controlled three-phase current for the motors, which means thrust can be commanded almost instantly and very precisely. Silicon carbide power electronics in inverters enable high voltage and efficiency in smaller form factors. That means inverters are becoming an integrated part of the propulsion system rather than a mass penalty. Plus, they continue to get cheaper as they scale.
Embedded systems
The whole electric flight stack has been rapidly maturing. Sensors have become cheap and precise enough that drones and flying cars can measure their attitude, position and health in real-time. Embedded computers have become powerful enough to make that understanding actionable for control and navigation. Both the sensors and computer have also become much lighter, even as their performance has improved. This is the reason an iPhone or drone has better sensing and computation than aircraft had access to for most of aviation history.
This might surprise most, but the embedded compute supply chain is one layer of the Electric Stack not dependent on China. OEMs like ST Micro and TI operate global manufacturing networks. That said, commodity parts can’t simply be dropped into a certified aircraft, but the playing field has certainly changed. Redundant and reliable embedded systems that are low cost and lightweight are now practical.
The small aircraft cost premium can collapse by an order of magnitude
No laws of physics say that flying cars should be much more expensive than automotive at scale. But today, there’s more than an order of magnitude delta between the cost structure of a Cessna vs that of a Tesla.
Low volumes explain much of that difference. The chart below (log scale on both axes) shows vehicle price adjusted by weight against annual unit volumes. It’s a good-enough proxy for cost structure differences between the vehicles. Robinson sells around 100 R22 helicopters per year, Cessna around 200 172s. These aircraft designs are fundamentally unchanged except for optional glass cockpits, touchscreen flight displays. Contrast that with a Ferrari 296 GTB with far higher performance engines, and they are still about 2x the cost per pound.
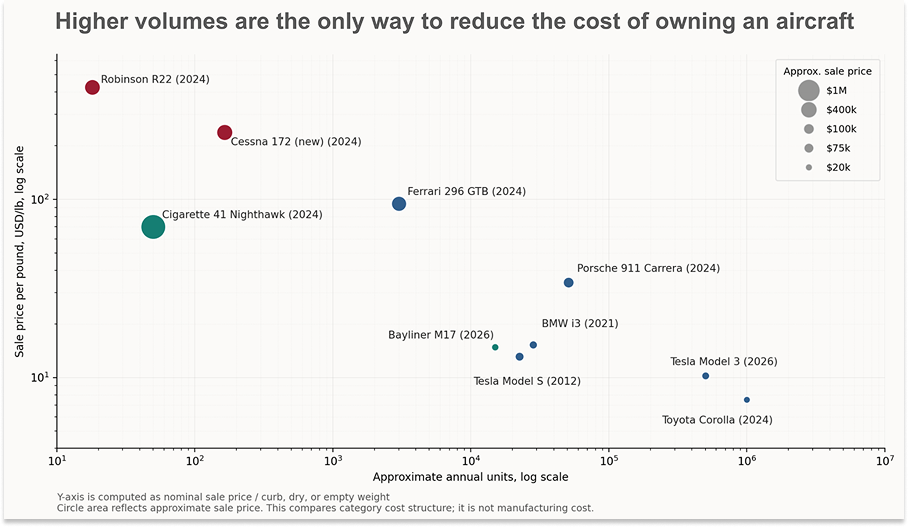
Look at the clear pattern of the falling cost/lb for different types of vehicles. Performance cars at low volumes cost more than a Model 3 or Corolla at much higher volumes. The Nighthawk is a low-volume, high-cost premium boat, vs the Bayliner M17. The pattern holds across structural materials as well, including composites. For example, see the Ferrari 296 vs BMW i3 cost/lb and unit volumes, with the i3 having a composite monocoque structure but at a much lower cost/lb.
It’s very, very hard to make things at low cost when only a hundred are made per year.
Product value is upstream of manufacturing volume. As we discussed above, the job for a car of going from A to B is often best done by one that drives itself. Software-defined intelligence is the logical conclusion for cars that are easy to use. Once a vehicle clears the baseline for acceleration, highway speed, range, and safety, reducing the driver’s burden becomes one of the most important forms of capability. Runway dependence and high pilot workload kept aircraft optimized around skilled performance. Ease of use, and the technology that unlocks it, could not become the primary dimension of aircraft design.
So the question is, why do we make so few personal aircraft?
We sprinkled clues throughout, but it’s effectively a high Idiot Index, Elon’s phrase for ratio of finished product cost over input material cost. Personal aircraft have had a high Idiot Index because of the skill required to fly them, their dependence on runways, and a high certification burden. It’s also a result of the low demand and glacial speed of technological progress in most of the GA industry for the last 50 years. You can’t approach the cost of materials if you’re not iterating.
The opportunity is to shrink the cost delta to only a double digit premium over cars. We can do that with two seat electric aircraft designed from the start for high-rate manufacturing, integrating low cost components into redundant systems, and low cost fabrication and assembly.
Composites have gotten cheaper and more reliable at scale. The higher-rate composite processes are becoming increasingly mature, though not widely used in aerospace. The problem for GA aircraft has been that they don’t have enough volume to justify processes like light RTM.
With volume, we can justify building out the flying car supply chain. The industrial base underpinning the tech stack for flying cars has not been decided yet.
The critical components like the high-performance electric motors and scaled-volume composite fabrication that we need are not concentrated in one country. This was an important reason for starting Vight now. We want to do final assembly, and vertically integrate increasingly more aspects of the full technology stack over time in the US: the software, compute, powertrain, structure and more.
The hard part is now execution, not invention
Building flying cars is definitely not easy. But we’re no longer waiting for miracle leaps in technology like batteries. The biggest risk is now integrating a system that offers a compelling product that is easy to use.
The first wave of eVTOL companies forced a lot of the unknowns into the open. Learnings like how to handle complex transition aerodynamic interactions, redundancy of distributed electric propulsion, flight-test discipline. Those are still hard problems. But they are now engineering problems. They do not require a new battery chemistry, a new motor physics, or a new theory of flight.
One non-technical thing that has blocked the future of flying cars has been the regulatory pathway. For flying cars to be feasible today, even with all of the improvements on the tech side, we’d need a new one.
Is there now a regulatory pathway for such a product to exist? Yes indeed.
MOSAIC, the new regulatory path
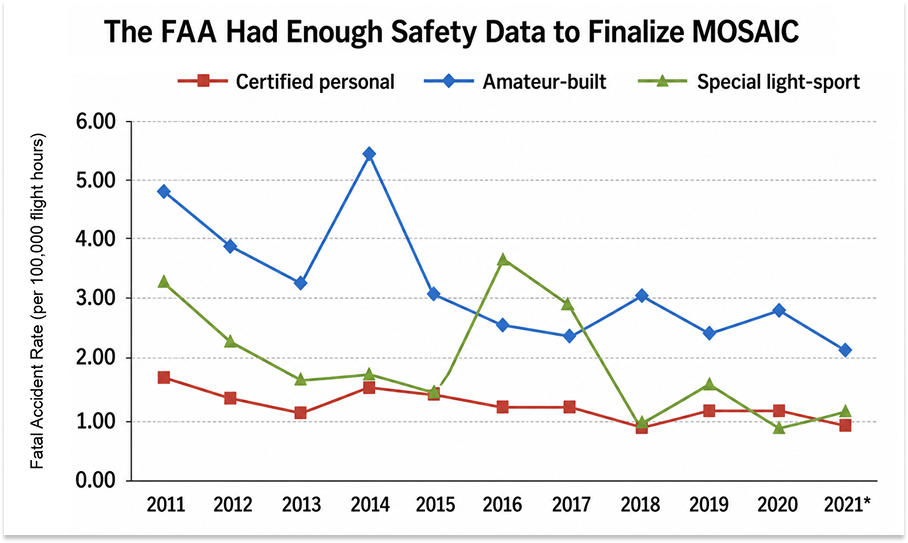
For decades, personal flying cars were trapped between two regulatory paths: too small to be useful, or too expensive and slow to certify. The FAA’s MOSAIC ruling opens up another, better path.
MOSAIC stands for Modernization of Special Airworthiness Certification. It’s a regulatory path that is a performance-based approach that is designed to enhance safety without overburdening the engineering and testing required. It also opens up more useful VTOL electric aircraft for private use.
MOSAIC is a huge upgrade to the Light Sport Aircraft (LSA) category that had initially been introduced in 2004 to make safe personal flying more accessible and lower the certification burden. Since then, the FAA has seen that light-sport aircraft (LSA) have become as safe as other general aviation aircraft in recent years, giving them the confidence to expand the type and capabilities of LSAs, while intending to make them even safer. The FAA also wanted to encourage people to fly fewer amateur-built aircraft and more factory-built LSAs under MOSAIC.
For the future of flying cars, that unlocks all these capabilities that we’ve been talking about.
MOSAIC makes critical changes to unlocking the high point-to-point freedom future at high speeds. It allows, for the first time, VTOL-capable general aviation aircraft to be certified without having to go down the very expensive 21.17(b) path that air taxis had to follow, or be constrained into a small form factor like a Jetson or Pivotal ultralight.
It unlocks building VTOL-capable platforms, initially with two seats with up to 250 knot (287 mph) cruise speed, that can be flown in any airspace you can fly a GA personal aircraft today. There’s no restriction on max takeoff weight.
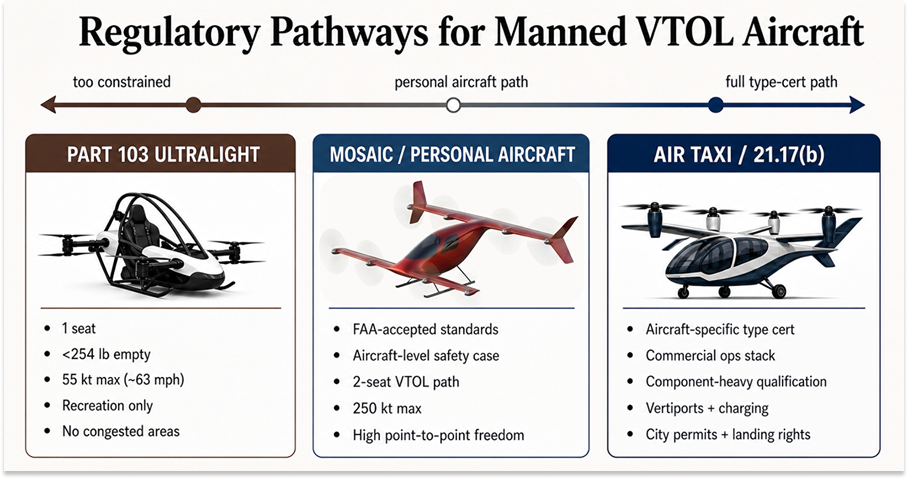
So why don’t air taxis just try to do this? Because their aircraft, companies, and certification programs were built around a different product. A 21.17(b) air taxi is a commercial aircraft for an operator network. A MOSAIC aircraft has to be designed from the start around the personal-aircraft pathway to be viable.
This is why the first market really matters, and why we’re taking a different approach.
The initial opportunity
Flying cars won’t start on downtown rooftops at first. The better initial opportunity is with owners of private properties who already pay for vehicles that expand what they can reach. Examples of such vehicles include utility terrain vehicles (UTVs) and powerboats.
An acreage sized property becomes a home base from which our customers can take off and land. A second property, a trailhead, winery, golf course, or resort become potential destinations. Vight aircraft will be intuitive and easy to fly, right from your backyard.

Many of our early backers want the vehicle for personal use. They’re tech-forward, excited by a vehicle that expands their possibilities for leisure and work at hard-to-reach locations. In addition, helicopter pilots already fly routes like this, albeit with significant workload. With the owner’s permission and the right local approvals, they can take off and land without needing runways.
To have real point-to-point freedom, our vehicles need to operate near where customers live, and eventually work. That makes noise a core design requirement. The first wave of eVTOL companies has already shown good progress, with aircraft that are dramatically quieter than helicopters in both hover and cruise. They got there by optimizing the aircraft as an integrated system, and the propeller blade design in particular. This is one of the places where Vight can leverage the hard-won learnings of what came before.
It’s easy to forget the leisure vehicle market is already large. Boats and RVs are not the same product, but they prove that people spend serious money on leisure-focused vehicles. The US powerboat market is about a 200,000-unit-per-year market, and about $15 billion. The RV market is also tens of billions of dollars and ships over 300,000 units per year. In the US alone, there are more than 10 million registered powerboats and RVs. Those numbers are more than twice as large globally, but the US is by far the biggest market for these vehicles.
This is how large the leisure-only use case for human-piloted VTOLs is already, without considering the flying or autonomous capabilities of our platform on day one and as we continue executing.

Another compelling early market is for flight clubs and schools. Today, flight clubs are member-run non profit organizations that let pilots share the cost of owning and using aircraft. The limiting factor is they are runway-dependent. Runway-independent aircraft allow for flying experiences to move closer to the places people already travel for leisure, work, and community.
This is a small market compared to our vision, to be sure, but a necessary one. We will take whatever ravenous demand exists in the early days, because scale will be how we win. Once we’ve ramped up to about a thousand units per year for the first platform, we’ll have the ability to scale rapidly down the cost curve.
We are targeting a purchase price of $200k-$250k at those volumes. We’ll continue to obsess about simplifying and automating the experience, improving speed and range, and shrinking the on-ground footprint. Of course, we don’t intend to keep the purchase price out of reach for most people for too long. By our fourth generation platform, we are targeting a sub $100k price point, and in partnership with the FAA, we aim to make the flying experience as effortless as taking a Waymo is today.
The master plan for new software-defined hardware has been codified for a while. The Tesla Roadster is the classic vehicle example of this, with about 1,000 units of the Roadster per year at similar inflation-adjusted prices to what we’re targeting. Henry Ford shipped multiple vehicles before the Model T became a breakout success, even more so in rural than urban areas.
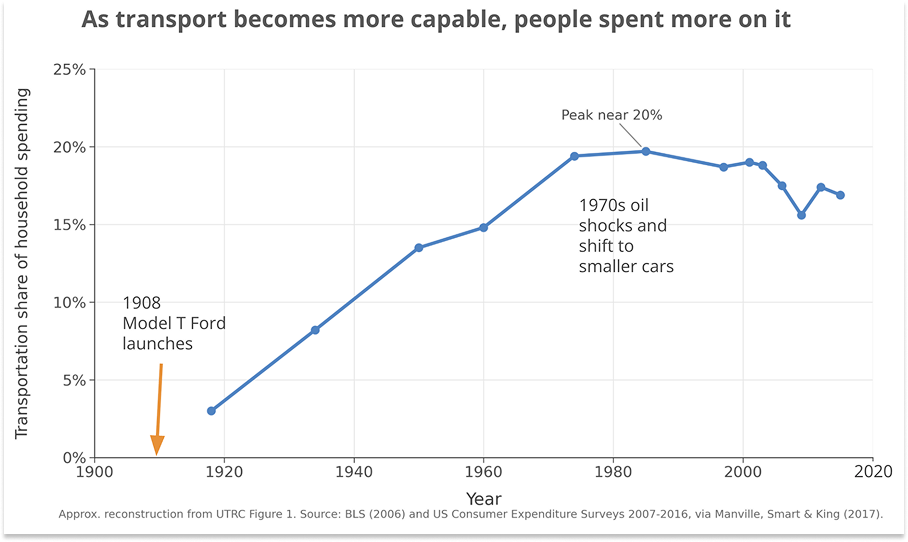
As personal transport became more capable, people spent more on it. Cars became a better investment as highways were built out and vehicles became safer and easier to use. The Model T entered production in 1908 and over the next century, transportation rose from a negligible share of household spending to over 15%.
I saw this pattern up close. My dad immigrated to Australia when I was three. In his first year, my dad would walk for hours looking for work. His first car was a beat-up $500 manual early 80s Ford Meteor. His second was a $2,000 Holden Camira, an automatic but it still ran on leaded gas. He washed that car proudly. A year later, though, he bought a brand-new 1994 Toyota Camry.
That is what better transportation does. It stops being just an expense and starts becoming a bigger part of daily life.
With each vehicle generation, we’ll leverage our learnings to build more capable, more intelligent platforms that cost less and unlock significantly more demand. Then, we’ll continue down the cost curve, opening up even more demand.
This is the use case that’s eluded aviation forever. But once we have vehicles shipped to paying customers, Vight can then convert learnings from those early flights into an operating flywheel.
The operating flywheel
We have a long way to go to get from where we are today to our full vision, but our bet is that operating from private property compounds.
Takeoff and landing sites are owned or controlled by our customers, avoiding the need for public vertiports with high buildout cost and permitting friction. Even more importantly, private properties unlock high point-to-point freedom, enabling flights to happen where our customers will need them. More flights happen, across more geographies and uses.
Every aircraft and every flight teaches us how the vehicle behaves and how customers actually use it. It also helps speed up iterations on improving maintenance, site operations, and what makes the experience feel safe and simple.
Those lessons feed five loops at once:
Aircraft model loop
Customer experience loop
Endpoint/destination loop
Cost loop
Autonomy and services loop
1. Aircraft model loop
For development, the impact implications are massive as we can feed that back into both our simulation model, closing the gap on sim-to-real and better predicting how our platforms will fly before they are in the air.
2. Customer experience loop
For customers, it means we can improve the flying and maintenance experience through the vehicle life cycle. This includes over-the-air updates for non-safety critical features, including autonomous pilot-assist, and predictive maintenance, such as swapping battery packs near end of usable life.
3. Endpoint/destination loop
For endpoints (i.e. destinations), each site gives us a clearer operational playbook for what works. Property and flight club owners can use that playbook to activate more sites, especially at places like resorts, clubs, private communities, and industrial parks.
Indeed, fly-in communities already exist where residents can access by plane or helicopter. There are a few hundred in the US, and about 30,000 people live in them. The largest, Spruce Creek Fly-In, has about 5,000 residents in about 1,500 homes spread over about 1,300 acres. Others are spread all over the country, with even some that occupy small islands like North Captiva Island in Florida. Some are suburban, like Lakeway in Austin, and others are remote, like Alpine Park in Wyoming or Mountain Air in North Carolina.

Over time we’ll see shared endpoints emerge for approved users. These will not need the infrastructure required for an urban vertiport or runways. We’ll also be able to piggyback on any existing vertiport build-out by other companies, as we won’t gain an advantage by owning and building out this infrastructure. That said, we will help with standardized operating playbooks to make setting up infrastructure as easy as possible for property owners. We expect many land owners to be motivated to set up infrastructure that enhances the usage of their properties, and want to make this as seamless and profitable for them as possible.
4. Cost loop
We’ll also come down the cost curve by making better platforms at lower cost. Cruise speed, range, intelligence, noise reduction, and hybrid powertrains will all improve vehicle capabilities, increasing demand to keep pulling costs down. The goal is to drive down the unit costs toward a car-like cost structure, with only a double-digit premium at scale, as we discussed in the cost premium section above.
5. Autonomy/services loop
Over time, more pilots utilize the network. This accelerates the operating flywheel and lets us double down on future platforms and more advanced autonomy.
As our fleet compounds flight hours and we continue to engage with the FAA towards end-to-end unsupervised autonomy. We’ll standardize and automate maintenance, servicing and site ops, accelerating the advantage that will deepen with more flight hours. Our advantage will be the real world data lead that accelerates our ability to validate our autonomy models in sim. Simulation will help scale that evidence, handling every edge case required for safe, reliable truly autonomous flight and streamlined operations, starting with smaller pilot programs for fully autonomous operations. Once proven, that enables a network of autonomous flying robotaxis that do not require vehicle ownership.
When people picture flying cars at scale, they usually imagine cities filled with aircraft moving between rooftops. It’s true that they will increasingly fly to business campuses, industrial parks, and eventually more urban corridors, and this will drive real demand. But I don’t think that is the biggest unlock.
The biggest unlock is actually expanding the map: making places that are currently too far, too remote, or too inconvenient feel close enough to become part of daily life.
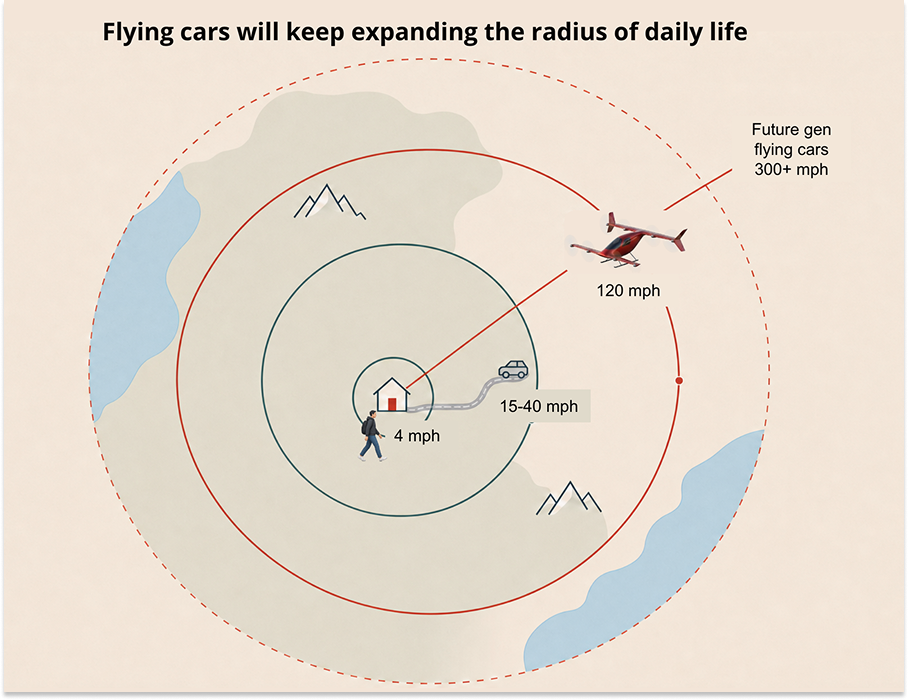
Expanding the radius of daily life
The biggest impact of flying cars will be expanding the radius of daily life. The promise is optionality: more places where you can live, work and visit.
No one can predict the future, but also, this future will not happen without highly motivated people aligned on the goal. We think this future could happen in three phases:
Existing acreages and remote destinations become more valuable.
More people move into areas that most benefit from flying cars.
Cities lose their monopoly on proximity (but also benefit in this future).
Being able to travel point-to-point at 120 mph expands where we can go on a daily basis. There’s no limitation from traffic or roads that have to follow the contours of the land. What was once a weekend trip becomes a quick hop. As we upgrade cruise speeds to approach 300 mph and beyond, our daily radius will continue to expand:
Marchetti’s Constant has proven so reliable throughout human history and in so many regions that he called it an “invariant.” The hard part is expanding where people can get within 30-60 minutes. If you pull that off, it seems inevitable that people will take advantage of the speed to spread out, and when they do, we can expect some interesting second- and third-order effects.
Existing acreages and remote destinations become more valuable. Over several product generations, when you can compress a 200 mile / 3-4 hour drive into a 45 minute flight, the land inside the larger circles becomes a compelling real estate play (not investment advice). Packy was one of the first people I spoke to who understood how this expands the local frontier, as he wrote about in Scarce Assets.
More people move into areas that most benefit from flying cars. Before cars and highways, suburbia was not a thing. Suburbs shaped where many people live today, defined by cars as the primary mode of transport in almost every American city. They made access to downtown areas closer for people living further away from them.
Autonomous and fast long-range eVTOLs will also enable a new pattern of living. It will be easier to live on a ranch, a forest cabin, or new developments like CA Forever. Mountain or island homes that were too disconnected to be practical will become normal places to live, work, and build. That’s only possible when the people, activities and amenities take a fraction of the time to reach.

People in remote areas already have access to Starlink. They have battery backup and can be off-grid with solar if they choose to. Small modular electrolyzers and direct air-capture will enable on-site synthetic hydrocarbon production. Drone delivery services will be normal. Autonomous trucks will move heavier and bulkier supplies to wherever people want to live.
The hinterlands become more valuable, more compelling, more usable. Regional economies can become more connected without needing to route everything through the same city center. Flying cars will decentralize economic opportunity.
Cities lose their monopoly on proximity (but also benefit in this future). Cities will not just disappear. They benefit too, mostly through services and shared endpoints. Flying car garages in cities might look like the automated car parking warehouses that have existed for decades. Ground robots or automated tugs will move aircraft between landing pads, charging bays, maintenance areas, and dense storage slots, the same way automated parking systems already move cars through compact garages.
But cities stop being the default hubs for opportunity. As more people, goods, energy, data and eventually manufacturing organize around new endpoints, the frontier of daily life moves outward. The suburbs give way to more distributed communities and an incredibly exciting future on our planet.
If this all sounds too utopian for you, this vision will take decades and multiple product generations. The flying car layer of this future is very hard. We’ll need to make the experience safe, affordable, quiet enough, and easy enough to operate. We’ll need to earn the trust of our customers, property owners, insurers, local authorities, and the FAA. Future platforms with unsupervised autonomous capabilities will require many iterations of our operational flywheel, and ongoing engagement with regulators. But it’s a good quest and, as we’ve shown, it’s possible. Now we just need to do it.
This is just the beginning
It is too narrow to think of flying cars only as vehicles. They are autonomous robotics platforms operating in open physical space. Many robotics categories will automate tasks inside the world we already inhabit: homes, warehouses, factories, sidewalks.
Flying cars do something different. They change the shape of the world people can inhabit. That is why the better analogy is the car and the highway network. They changed where people lived, what land was valuable, how regions grew, and what freedom on the open road felt like.
Flying cars will help usher in the next paradigm for lived environments. Cars and highways enabled suburban life for tens, if not hundreds, of millions of families in developed countries. Flying cars will unlock new ways of living in new locations for just as many, if not more, people in the decades ahead. They will unlock freedom in the open skies.

Growing up, each new transportation mode changed the size of my world. My first bike gave me suburban reach in Adelaide, Australia, letting me visit my friends on weekends without needing a parent driver. My first car expanded that reach. Both made more places feel reachable and made my life feel less bounded. While the specific places are different, this growing sense of freedom is a universal experience.
That freedom, the expansion of what is possible in daily life, is the promise of flying cars.
Nothing worth doing is easy. Making life incredible on Earth will be extraordinarily hard. But if we’re locked in on the mission and we execute well, the path is becoming clear. We can do this.
If you want to help make this future real, come build it with us.
Thanks to Tsung for writing and teaching me about flying cars.
That’s all for today. We’ll be back in your inbox this week.
Thanks for reading,
Packy
68 ish YO with PPL, formally applying for test pilot job! Well done!
Feels like the Jetsons promised us this future a few decades back, so sign me up. Waymo in the sky is a lovely pitch right up until two of them disagree over the same patch of air — what does that look like?